
目录
快速导航-
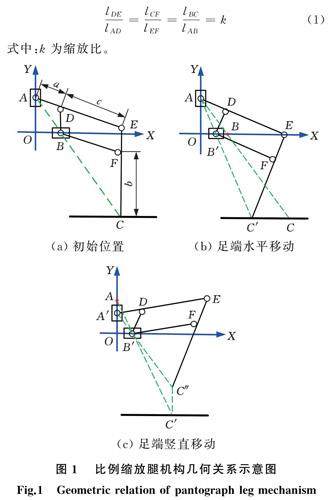
机械基础工程 | 重载足式机器人变缩放比例腿设计
机械基础工程 | 重载足式机器人变缩放比例腿设计
-
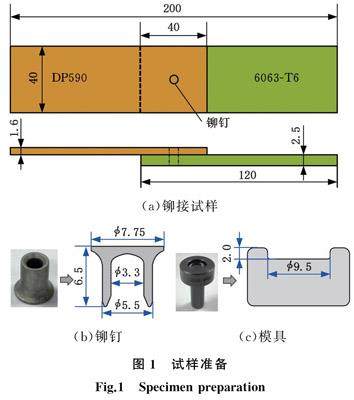
机械基础工程 | 铆钉裂纹对自冲铆接力学性能影响的仿真与试验研究
机械基础工程 | 铆钉裂纹对自冲铆接力学性能影响的仿真与试验研究
-

机械基础工程 | 煤矿电动车辆单踏板再生制动效能分析
机械基础工程 | 煤矿电动车辆单踏板再生制动效能分析
-
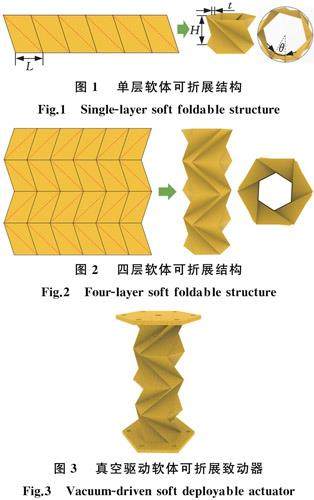
机械基础工程 | 真空驱动软体可折展致动器驱动特性研究
机械基础工程 | 真空驱动软体可折展致动器驱动特性研究
-
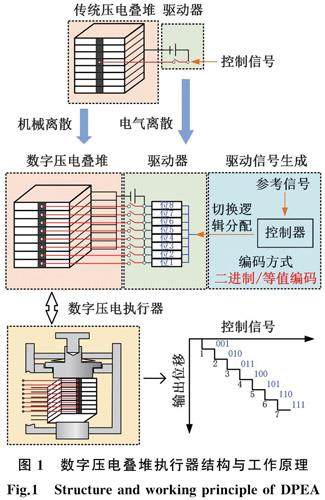
机械基础工程 | 数字压电叠堆执行器:原理、建模与控制
机械基础工程 | 数字压电叠堆执行器:原理、建模与控制
-
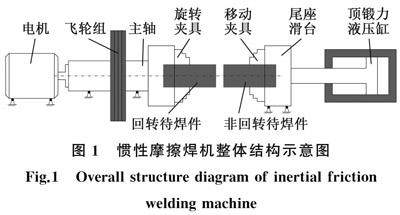
机械基础工程 | 重型高精度惯性摩擦焊机移动夹具定位误差分析
机械基础工程 | 重型高精度惯性摩擦焊机移动夹具定位误差分析
-
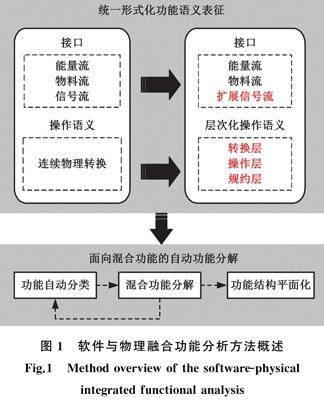
机械基础工程 | 复杂机电系统的软件与物理统一的形式化功能分析
机械基础工程 | 复杂机电系统的软件与物理统一的形式化功能分析
-
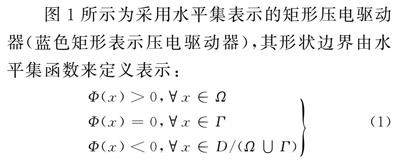
机械基础工程 | 考虑最小尺寸约束的内嵌可移动压电驱动柔顺机构拓扑优化设计
机械基础工程 | 考虑最小尺寸约束的内嵌可移动压电驱动柔顺机构拓扑优化设计
-
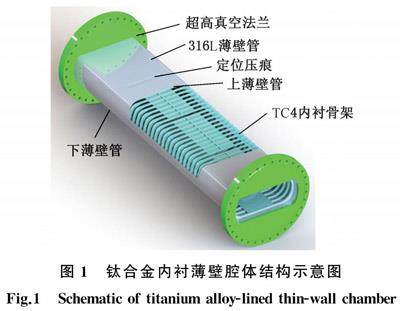
机械基础工程 | 钛合金内衬薄壁腔体结构设计与性能研究
机械基础工程 | 钛合金内衬薄壁腔体结构设计与性能研究
-
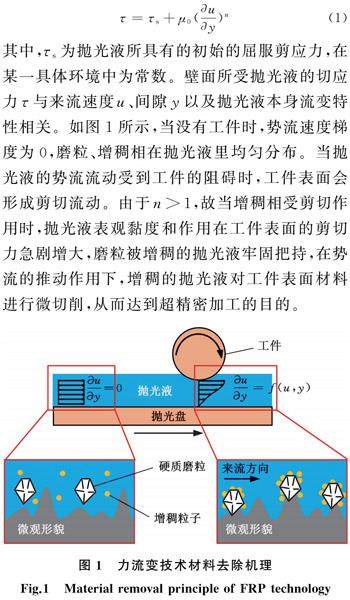
机械基础工程 | 力流变工艺对轴承滚道表面质量与精度的影响
机械基础工程 | 力流变工艺对轴承滚道表面质量与精度的影响
-
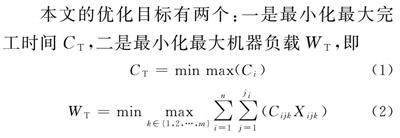
智能制造 | 考虑峰值功率受限约束的柔性作业车间调度研究
智能制造 | 考虑峰值功率受限约束的柔性作业车间调度研究
-
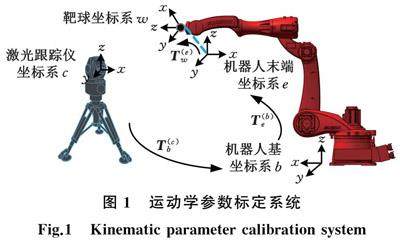
智能制造 | 基于多策略融合蜣螂优化算法的工业机器人运动学参数辨识方法
智能制造 | 基于多策略融合蜣螂优化算法的工业机器人运动学参数辨识方法
-
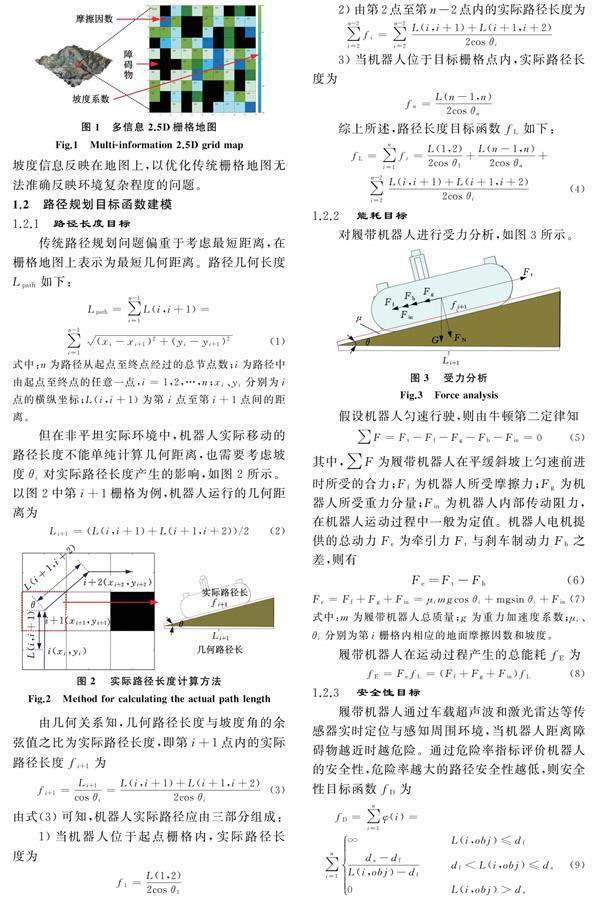
智能制造 | 非平坦环境下履带机器人多目标路径规划方法研究
智能制造 | 非平坦环境下履带机器人多目标路径规划方法研究
-

智能制造 | 基于虚拟运动神经系统的六足机器人自适应运动控制
智能制造 | 基于虚拟运动神经系统的六足机器人自适应运动控制
-

智能制造 | 利用改进卷积神经网络的螺杆砂带磨削表面粗糙度预测
智能制造 | 利用改进卷积神经网络的螺杆砂带磨削表面粗糙度预测
-
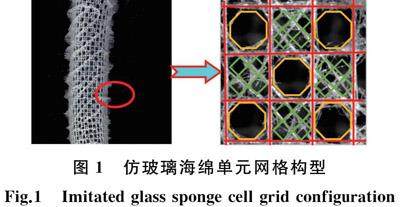
生物制造 | 仿生高强韧轻质管结构的抗弯性能研究
生物制造 | 仿生高强韧轻质管结构的抗弯性能研究
-
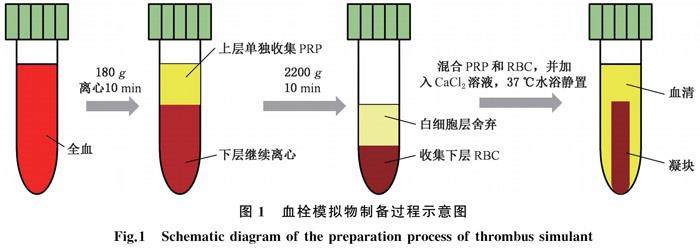
生物制造 | 血栓模拟物机械性能及切削破碎效果研究
生物制造 | 血栓模拟物机械性能及切削破碎效果研究
-
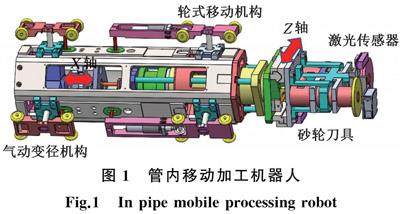
工程前沿 | 虑及刚度特性的管内机器人高精度焊缝打磨方法
工程前沿 | 虑及刚度特性的管内机器人高精度焊缝打磨方法
-
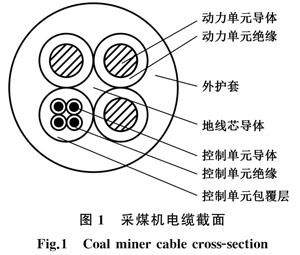
工程前沿 | 采煤机移动软电缆机械特性研究
工程前沿 | 采煤机移动软电缆机械特性研究
-

工程前沿 | 重载列车紧急制动过程踏面轮廓变化定量预测
工程前沿 | 重载列车紧急制动过程踏面轮廓变化定量预测
-
学会资讯 | 2024智能制造科技进展交流专题活动在南京举办
学会资讯 | 2024智能制造科技进展交流专题活动在南京举办







 登录
登录