
目录
快速导航-

综述与展望 | 智能网联汽车标准体系及重点标准研究与展望
综述与展望 | 智能网联汽车标准体系及重点标准研究与展望
-
汽车安全 | 某电动汽车侧面柱碰工况门槛梁截面参数优化
汽车安全 | 某电动汽车侧面柱碰工况门槛梁截面参数优化
-
汽车安全 | 基于力学性能安全的ATV 桁架式车身轻量化设计
汽车安全 | 基于力学性能安全的ATV 桁架式车身轻量化设计
-
汽车安全 | 基于整车动力学的EMB 线控制动系统功能安全概念设计
汽车安全 | 基于整车动力学的EMB 线控制动系统功能安全概念设计
-
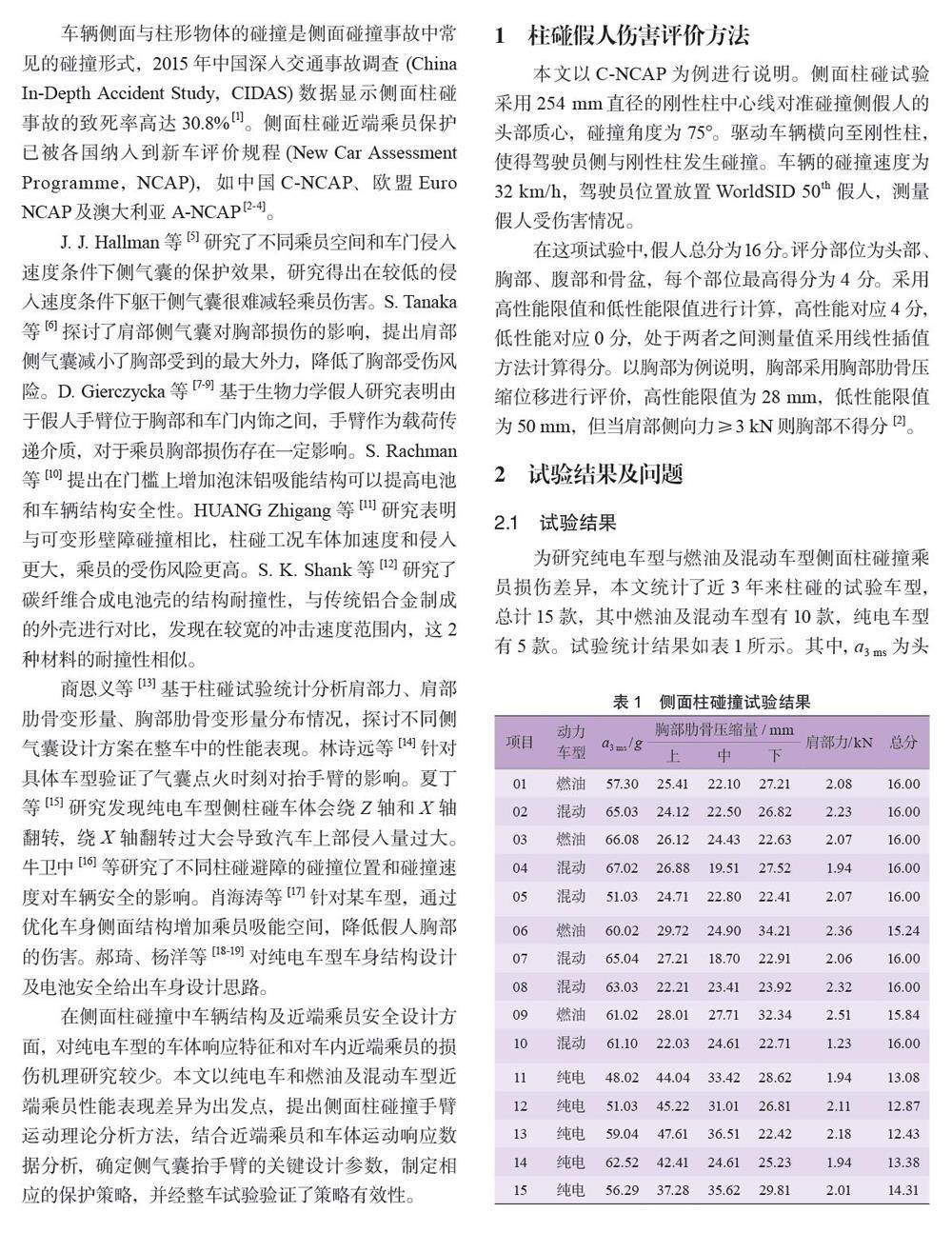
汽车安全 | 纯电车型侧面柱碰近端乘员损伤特征及保护
汽车安全 | 纯电车型侧面柱碰近端乘员损伤特征及保护
-
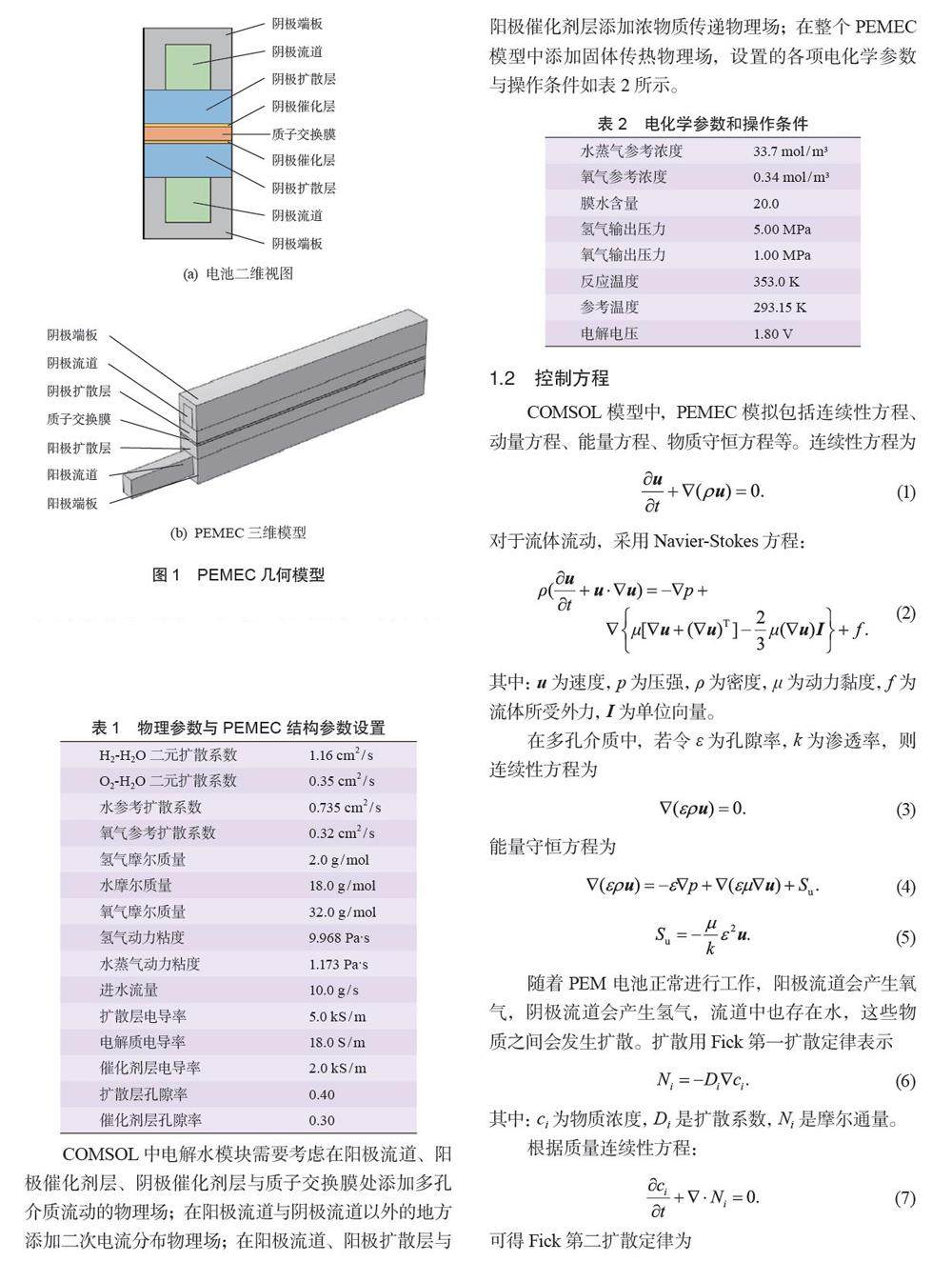
汽车节能与环保 | 质子交换膜水电解流道结构优化研究
汽车节能与环保 | 质子交换膜水电解流道结构优化研究
-
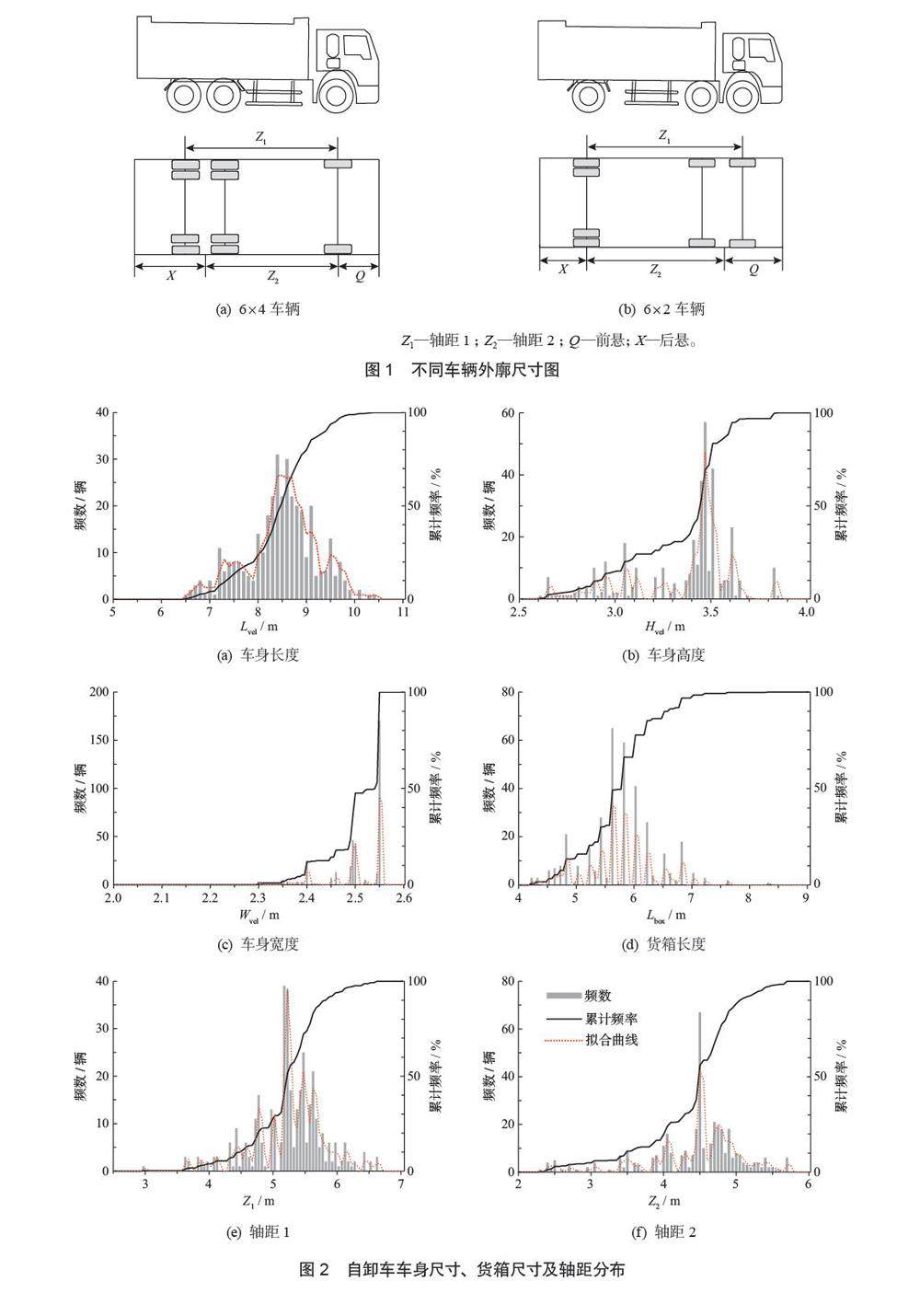
汽车节能与环保 | 基于全样本数据的三轴货车外廓分布特征与比功率分析
汽车节能与环保 | 基于全样本数据的三轴货车外廓分布特征与比功率分析
-
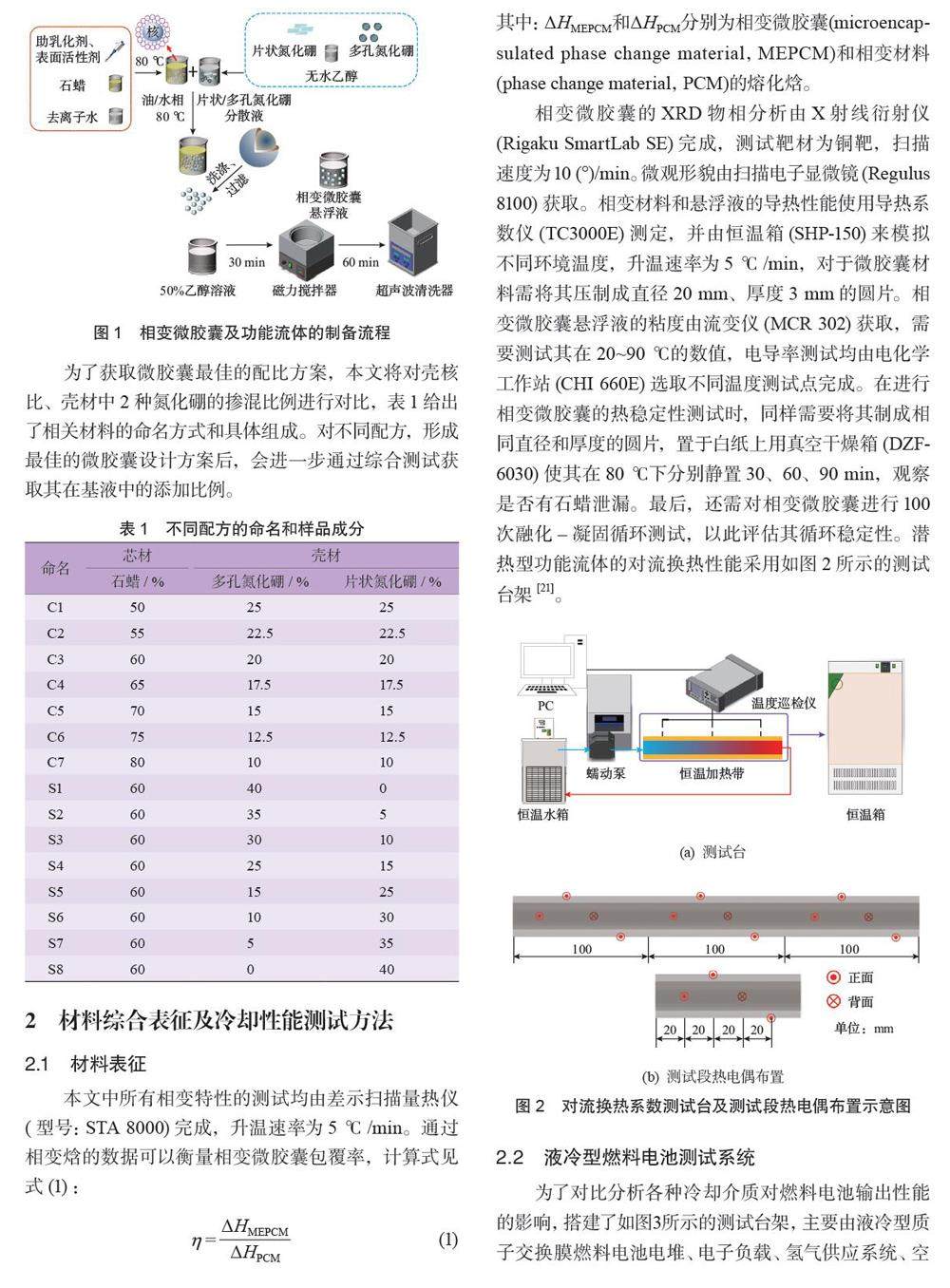
汽车节能与环保 | 杂化氮化硼复合相变微胶囊悬浮液的设计及在PEM 燃料电池冷却中的应用
汽车节能与环保 | 杂化氮化硼复合相变微胶囊悬浮液的设计及在PEM 燃料电池冷却中的应用
-
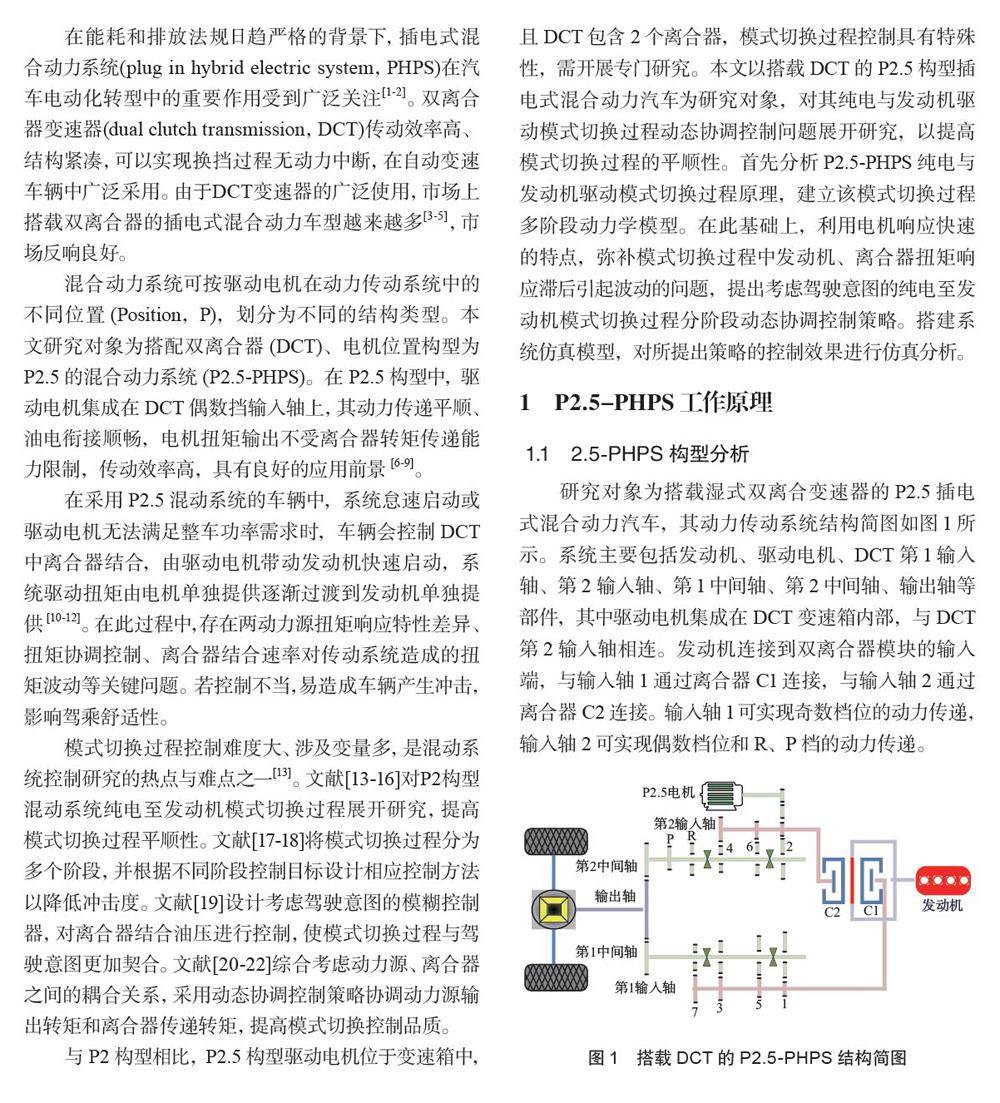
汽车节能与环保 | 考虑驾驶意图的P2.5-PHPS 纯电与发动机切换协调控制
汽车节能与环保 | 考虑驾驶意图的P2.5-PHPS 纯电与发动机切换协调控制
-
汽车节能与环保 | 基于Gauss 过程分数位回归模型的锂电池SOH 估计
汽车节能与环保 | 基于Gauss 过程分数位回归模型的锂电池SOH 估计
-
汽车节能与环保 | 考虑交叉口启停波的智能网联车混行生态驾驶策略
汽车节能与环保 | 考虑交叉口启停波的智能网联车混行生态驾驶策略
-
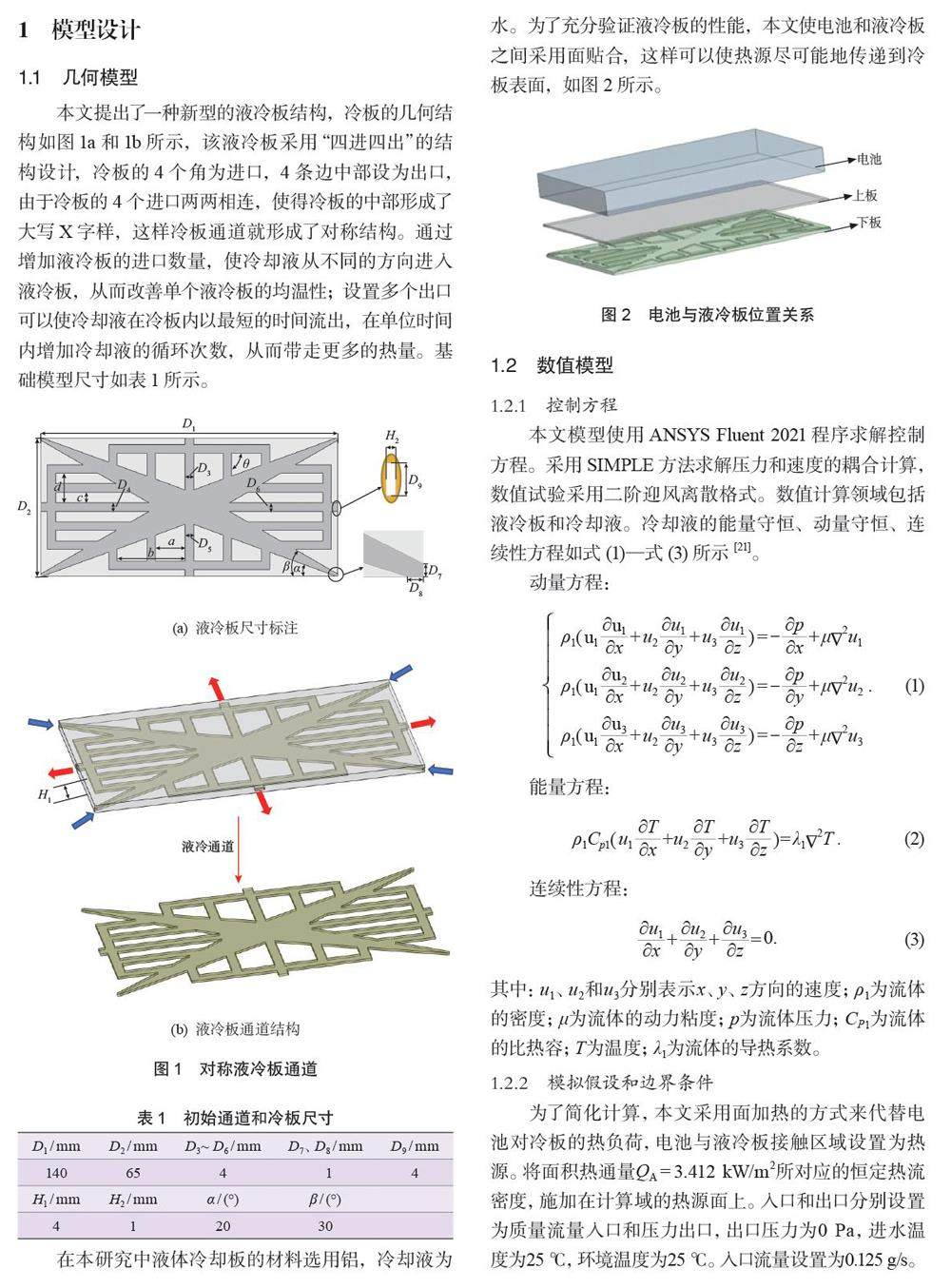
汽车节能与环保 | 基于多目标优化的液冷板散热性能分析
汽车节能与环保 | 基于多目标优化的液冷板散热性能分析
-
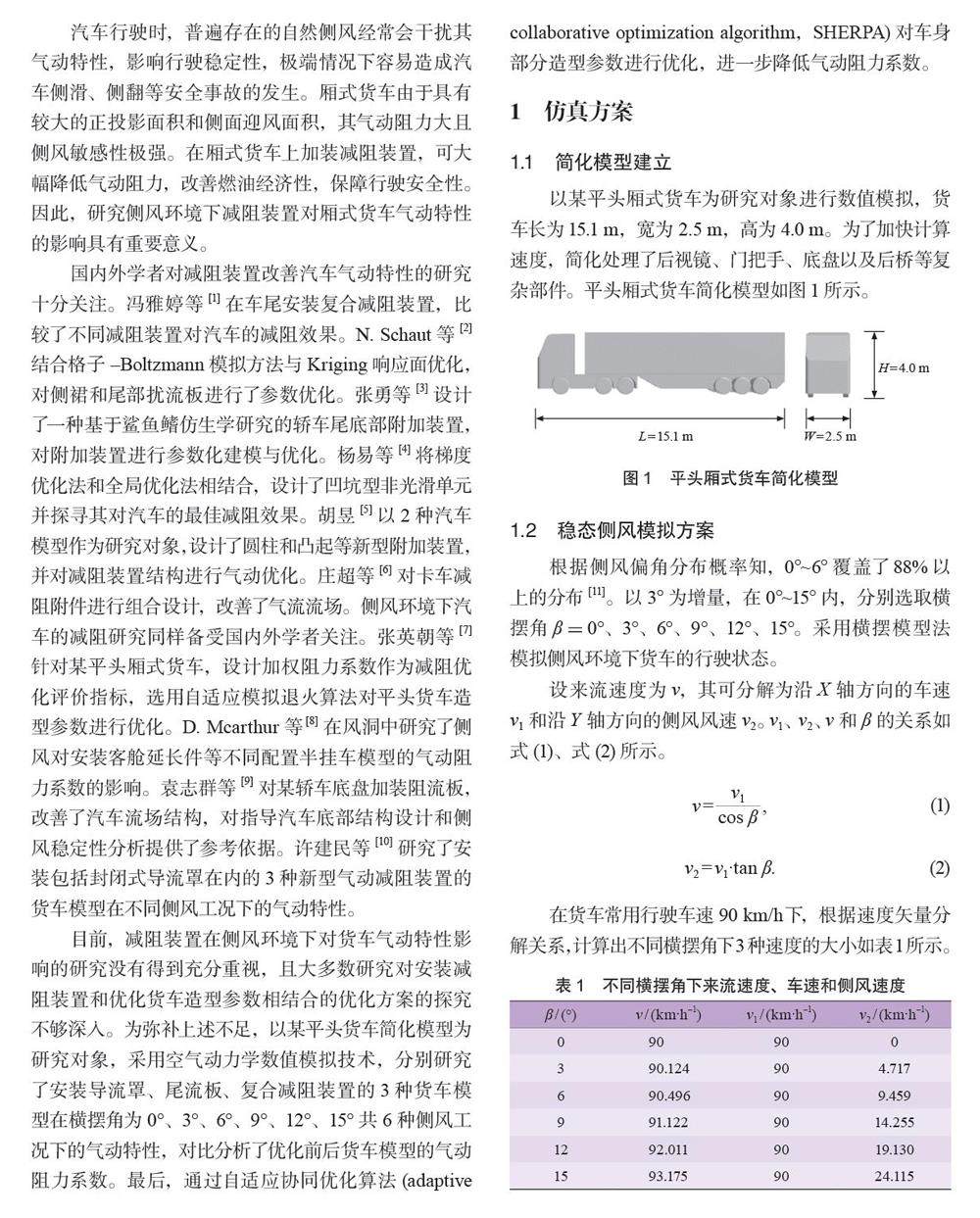
汽车节能与环保 | 减阻装置对平头货车气动特性影响的分析及优化
汽车节能与环保 | 减阻装置对平头货车气动特性影响的分析及优化
-
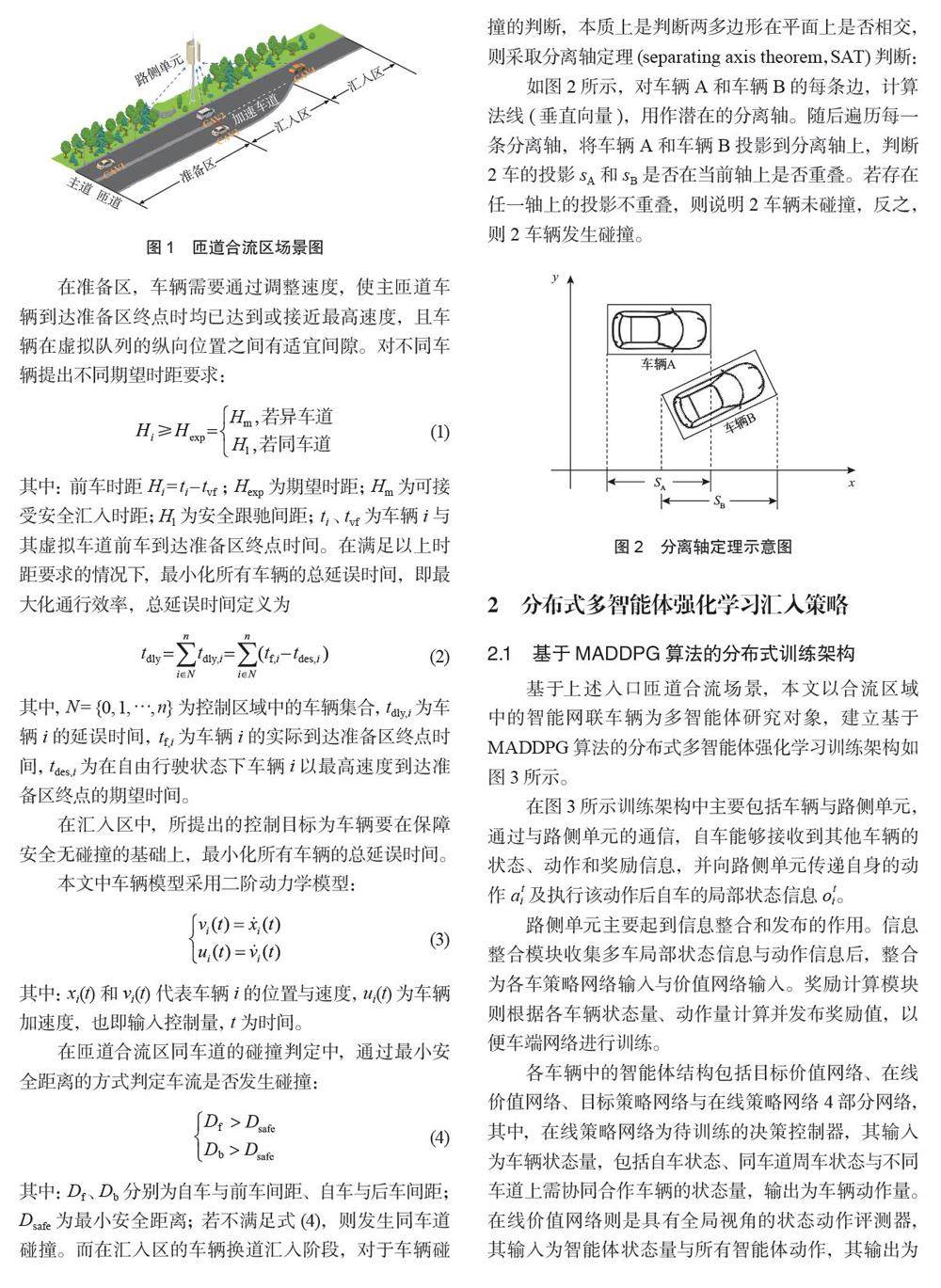
智能驾驶与智慧交通 | 基于MADDPG 算法的匝道合流区多车协同控制
智能驾驶与智慧交通 | 基于MADDPG 算法的匝道合流区多车协同控制
-
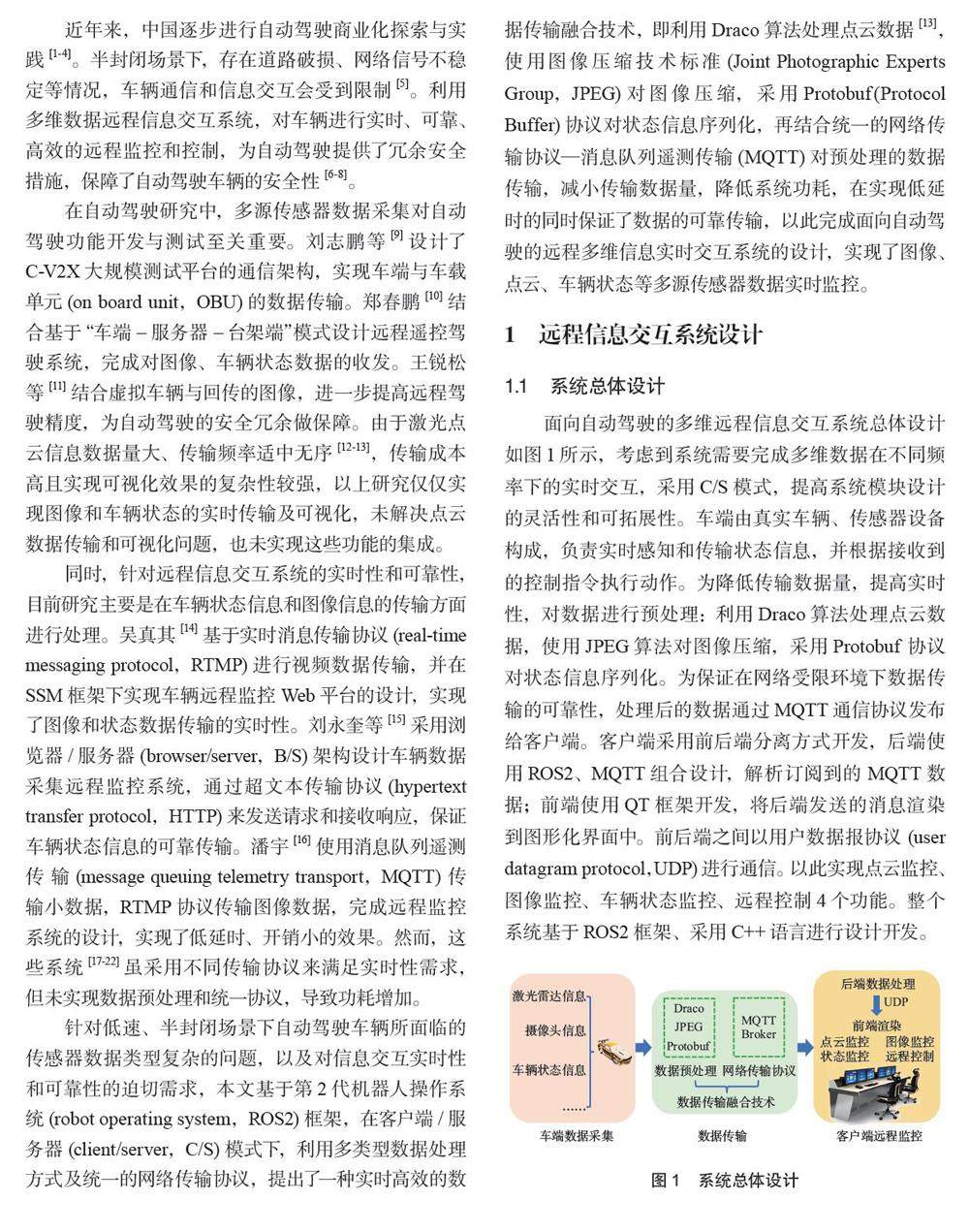
智能驾驶与智慧交通 | 面向自动驾驶的远程多维信息实时交互系统设计
智能驾驶与智慧交通 | 面向自动驾驶的远程多维信息实时交互系统设计
-

智能驾驶与智慧交通 | 高负载场景中考虑噪声及隐藏终端的C-V2X 模式4 性能分析
智能驾驶与智慧交通 | 高负载场景中考虑噪声及隐藏终端的C-V2X 模式4 性能分析
-
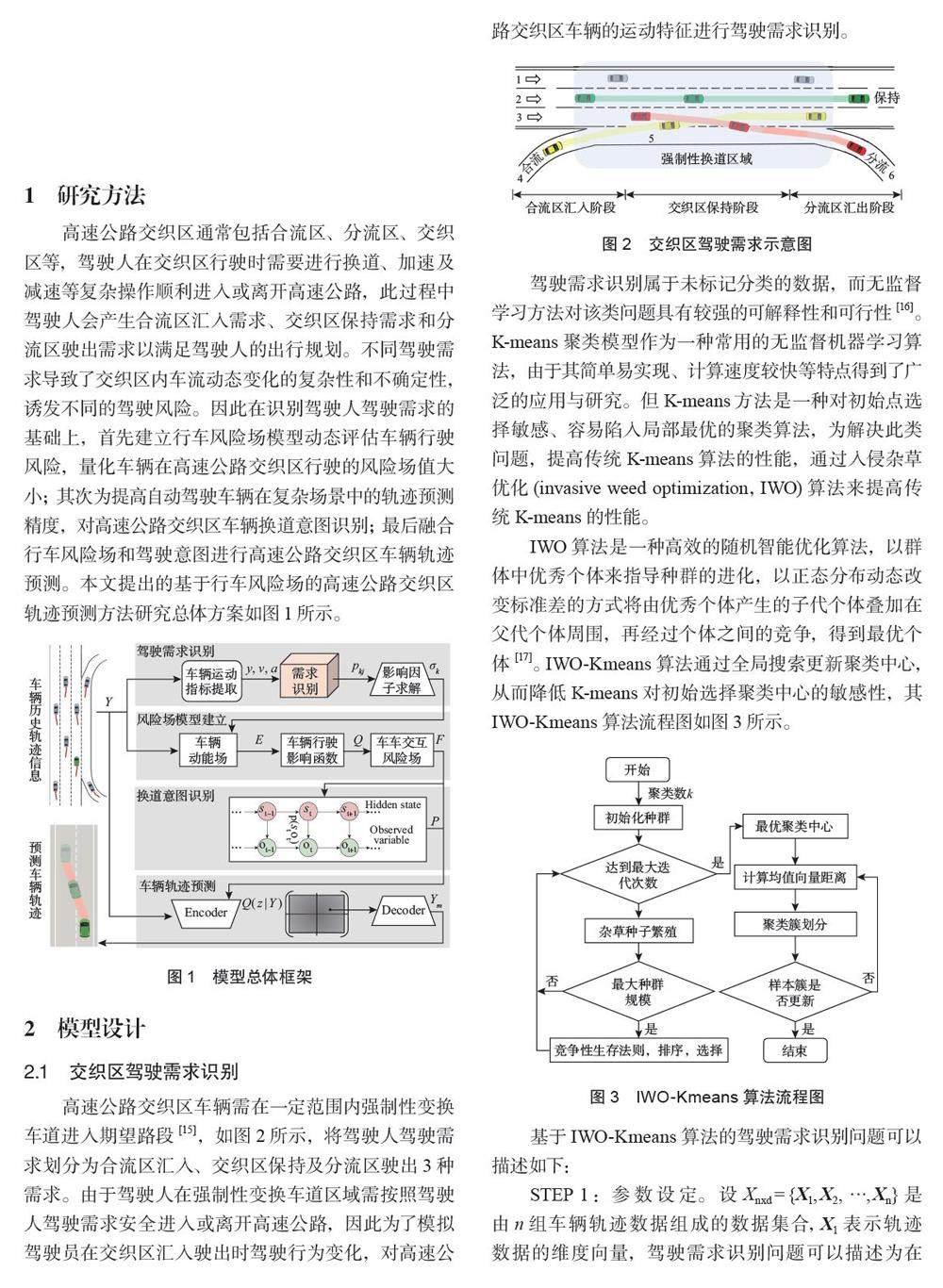
智能驾驶与智慧交通 | 基于行车风险场的高速公路交织区车辆轨迹预测方法
智能驾驶与智慧交通 | 基于行车风险场的高速公路交织区车辆轨迹预测方法







 登录
登录